 Ces micro-robots low-cost de moins de 2 cm² ont été développés par deux enseignants de l’Imperial College Robotic Society et sont parfaits comme plateforme d’apprentissage de robotique, pour les systèmes multi-agents, découvrir les bases de ROS (Robotic Operating System) ou tout simplement s’amuser !
Ces micro-robots low-cost de moins de 2 cm² ont été développés par deux enseignants de l’Imperial College Robotic Society et sont parfaits comme plateforme d’apprentissage de robotique, pour les systèmes multi-agents, découvrir les bases de ROS (Robotic Operating System) ou tout simplement s’amuser !
[Joshua Elsdon] et [Thomas Branch] avaient besoin d’une plateforme éducative qui pourrait répondre aux problèmes de place et de budget des classes de l’université. Comme ils ne trouvèrent rien de pas chère, simple et adapté à leur programme de cours qu’ils donnent dans leur clubs de robotique, [Joshua] et [Thomas] ont décidé de construire la leur. Leur projet est présenté sur le site hackaday.io en open-source.
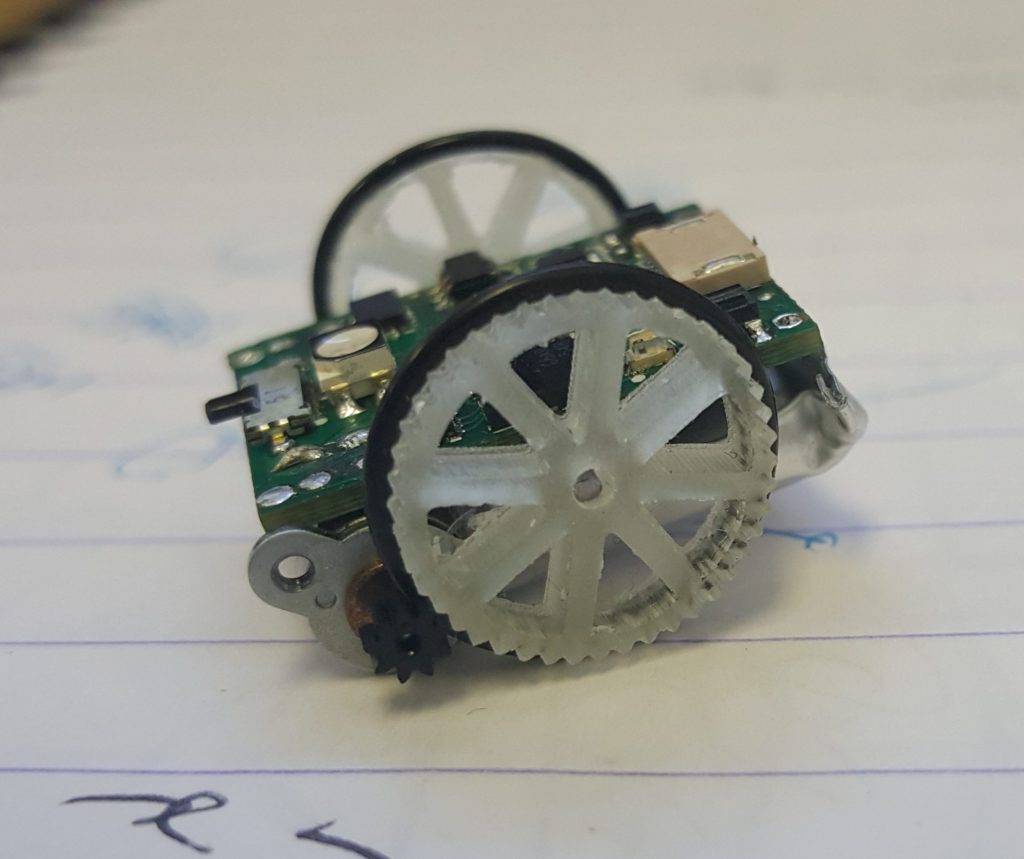
Ces petits robots occupent une surface de 2 cm² pour un prix cible de ~10€ chacun, dès lors qu’ils seront fabriqués en quantité. Ils sont équipés de 2 moteurs pas-à-pas, une LED RGB, une batterie,un capteur suiveur de ligne, un capteurs de collision et un transceiver infra-rouge pour communiquer avec le système maître, le ‘god bot’.
Le système maître est basé sur un Raspberry Pi avec quelques éléments additionnels. Les communications infra-rouges sont multiplexées avec tous les ‘petits’ robots et traque leur position et orientation simultanément à l’aide d’une caméra et les identifie à l’aide de la couleur de leur LED RGB. Le système maître fournit également l’interface de programmation pour les robots, de sorte que les étudiants n’ont pas à se préoccuper de procédures particulières pour flasher leur firmware et exécuter le code qu’ils ont développé. Grâce à cet intelligent système de multi-robot, bas coût, avec des capteurs embarqués, l’odométrie par les moteurs pas-à-pas et une système de positionnement absolue, ces petits robots sont très performants et permettent d’apprendre pas mal de choses !

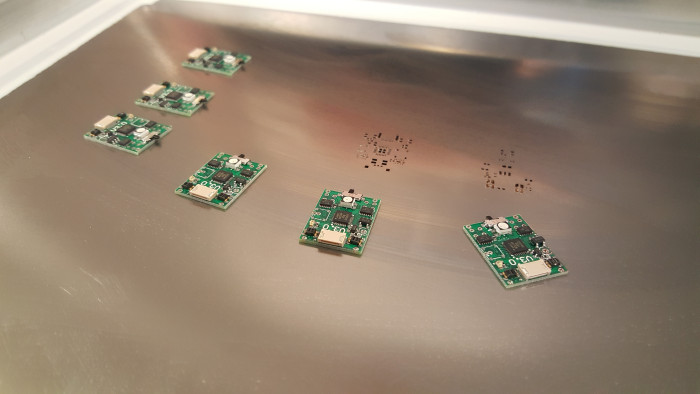
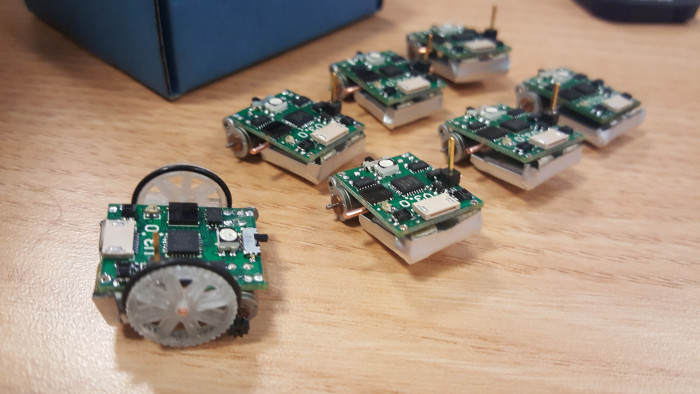
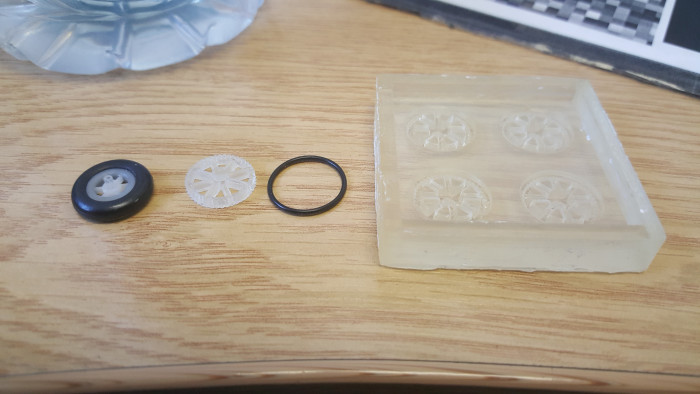

Comme souvent, il a fallu relever plusieurs défis lors de la construction de ces micro-robots, mais il est très formateur de suivre [Joshua Elsdon] et [Thomas Branch] pour découvrir comment ils les ont surmonté ! Assemblage des PCBs de petite taille, impression 3D, moulage de résine pour fabriquer les roues ou la programmation de ROS sont autant de points abordés.
La vidéo ci-dessous montre des tests de l’intégration dans ROS du retour vidéo pour la localisation et orientation des robots.
Source:
- Hackaday Prize Entry: Micro Robots For Education | Hackaday
- Micro robots for education (hackaday.io)
- TinyTeRP: A Tiny Terrestrial Robotic Platform